moocore: Core Algorithms for Multi-Objective Optimization#
Version: 0.4.0.dev0 (What’s new)
Date Jul 20, 2026
Useful links: Install | Source Repository | Issue Tracker
This webpage documents the moocore Python package. There is also a moocore R package.
The goal of the moocore project (multi-objective/moocore) is to collect and document fast implementations of core mathematical functions and algorithms for multi-objective optimization and make them available to different programming languages via similar interfaces. These functions include:
Quality metrics such as (weighted) hypervolume, epsilon, IGD+, (exact) R2, etc.
Computation of the Empirical Attainment Function. The empirical attainment function (EAF) describes the probabilistic distribution of the outcomes obtained by a stochastic algorithm in the objective space.
Most critical functionality is implemented in C, with the R and Python packages providing convenient interfaces to the C code.
Keywords: empirical attainment function, summary attainment surfaces, EAF differences, multi-objective optimization, bi-objective optimization, performance measures, performance assessment

The reference guide contains a detailed description of the functions, modules, and objects.

Detailed examples and tutorials.
Benchmarks#
The following plots compare the performance of moocore, pymoo, BoTorch, DESDEO, paretoset, Nevergrad, jMetalPy, fast-pareto, Optuna, moarchiving, and patatune.
Other Python packages are not included in the comparison because they are based on these packages for the functionality benchmarked, so they are at least as slow as them. For example Xopt and BoFire use BoTorch, pysamoo is an extension of pymoo. We do not include functions from the Bayesian optimization toolbox trieste, because it is much slower than BoTorch and too slow to run the benchmarks in a reasonable time (secondmind-labs/trieste#917). Similarly, we do not include paretobench because it is always slower than BoTorch for identifying nondominated points and more than 2000 times slower than moocore for computing the hypervolume in 3D (electronsandstuff/ParetoBench#57), which is too slow to include in the benchmarks.
Not all packages provide the same functionality. For example, pymoo does not provide the epsilon indicator. BoTorch and paretobench only provide the hypervolume. paretoset and fast-pareto only identify nondominated points. DESDEO, DEAP, and jMetalPy use moocore for computing the hypervolume, but other functionality, such as filtering dominated points, is still slower than moocore. Recent versions of seqme and pymoo (≥0.6.2) already use moocore for most functionality benchmarked here.
We would like to benchmark pygmo, however, it is currently impossible to install using pip (See esa/pygmo2#152).
We would also like to benchmark platypus, but its API is too different from
other packages. For example, it only supports filtering dominated points by
creating a new list of points, but it cannot identify their position in the
input. It cannot calculate hypervolume without normalization. It doesn’t
support ArrayLike inputs.
The source code for the benchmarks below can be found at multi-objective/moocore .
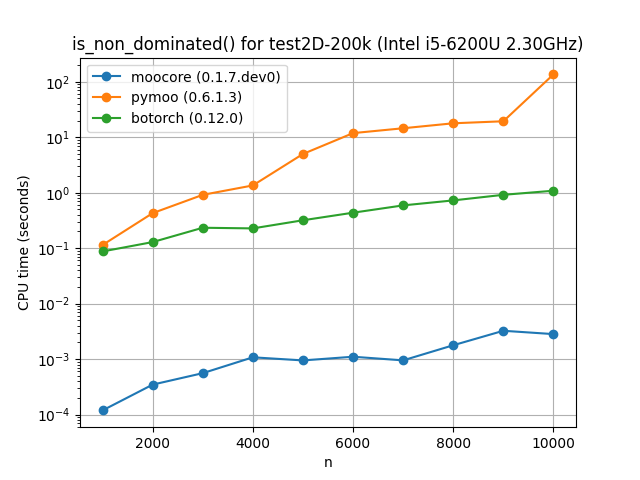
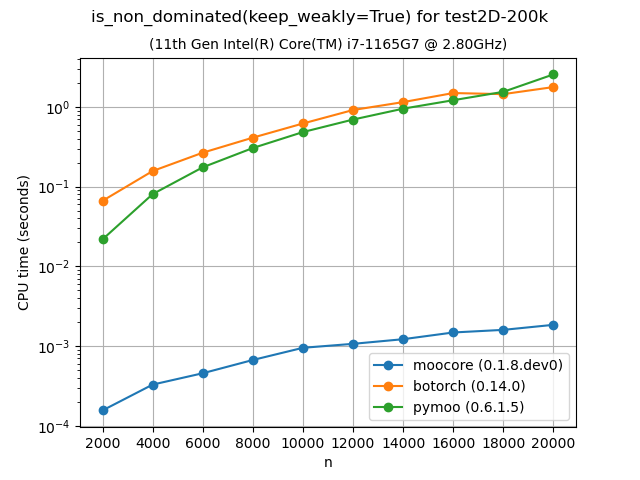
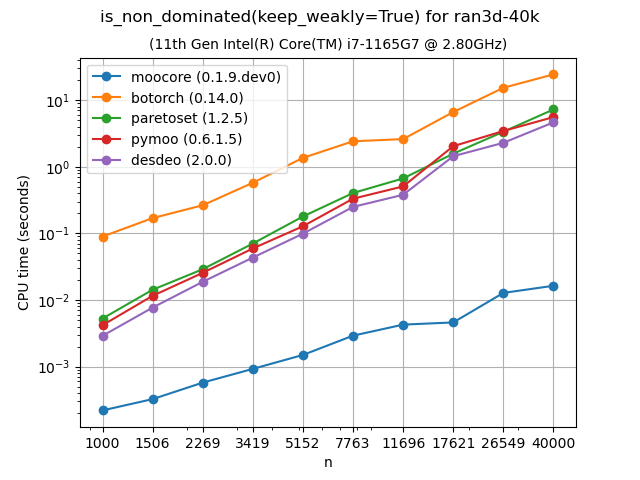
Identifying nondominated points#
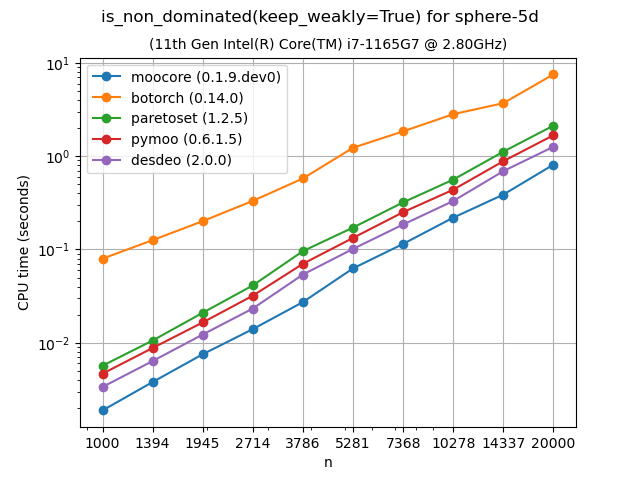
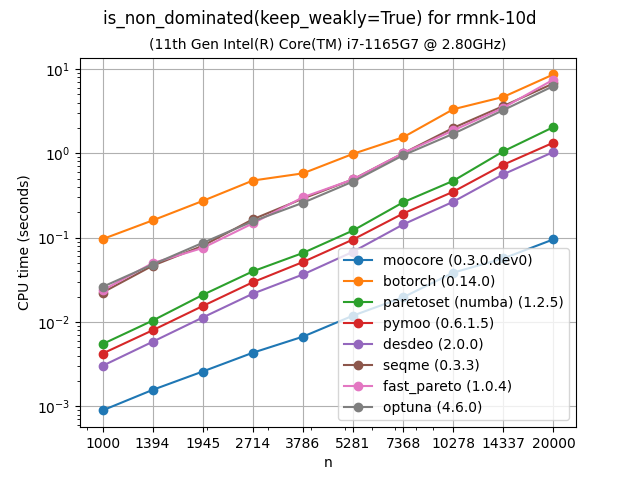
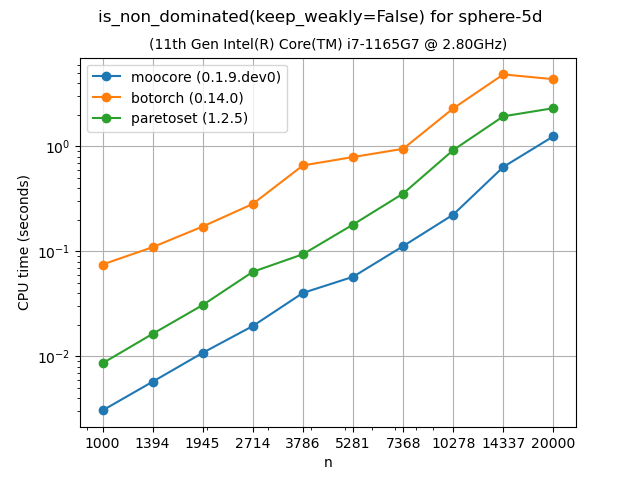
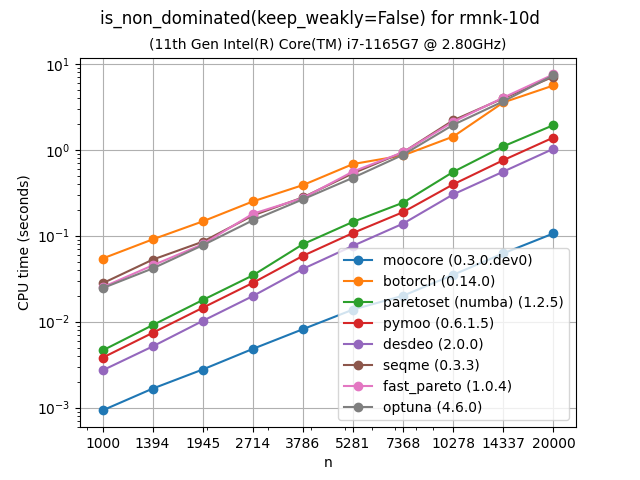
The following plots compare the speed of finding nondominated solutions, equivalent to moocore.is_nondominated(). We test both keep_weakly=False (the default) and keep_weakly=True. The former is only supported by BoTorch and paretoset. Thus, for the purpose of benchmarking the other packages with keep_weakly=False, we remove duplicated points from the data and exclude this time from the results. This makes all packages, except moocore, BoTorch and paretoset, seem faster than they actually are, because the user is forced to remove duplicated points when using them.
For 2D and 3D, the plots show that moocore is 10 times faster than DESDEO and paretoset and 100-1000 times faster than the other packages. fast-pareto claims to implement a \(O(n\log n)\) algorithm for 3D, but the benchmarks below indicate a \(O(n^2)\) complexity, similar to other packages and significantly slower than moocore.
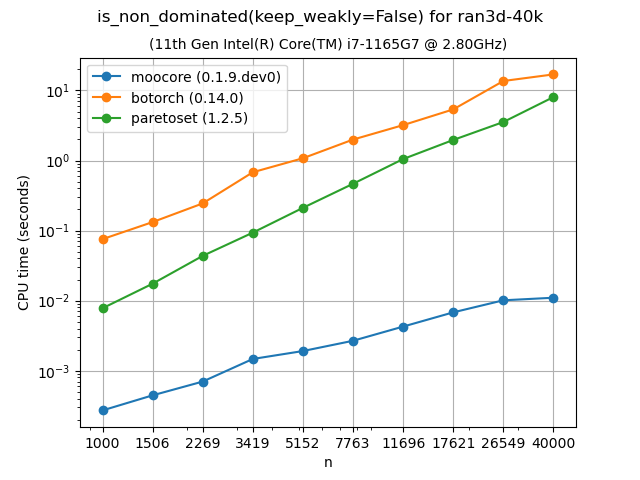
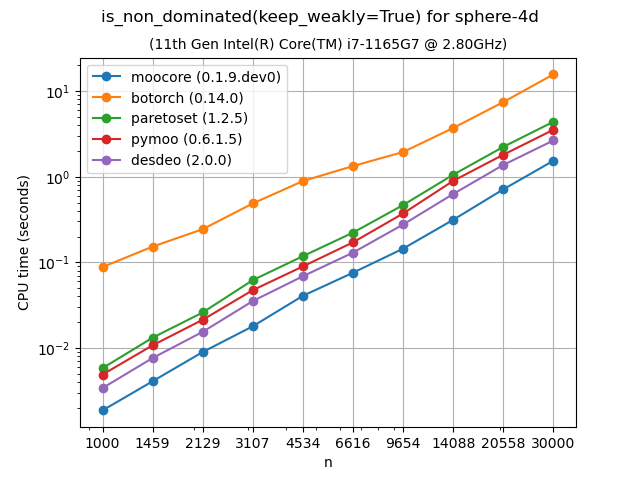
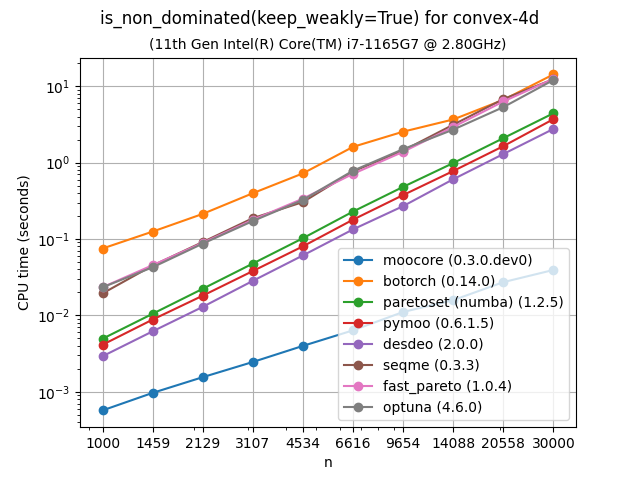
For dimensions larger than 3, moocore.is_nondominated() uses the
best-known \(O(n\log^{m-2} n)\) algorithm. fast-pareto claims to be
using a \(O(n\log^{m-2} n)\) algorithm, but the benchmarks suggest that it
uses a \(O(m n^2)\) algorithm, although slower than most other packages and
almost 100 times slower than moocore. The following plots with
keep_weakly=True show that moocore is at least 10 times faster than the
other packages, even for 10D.
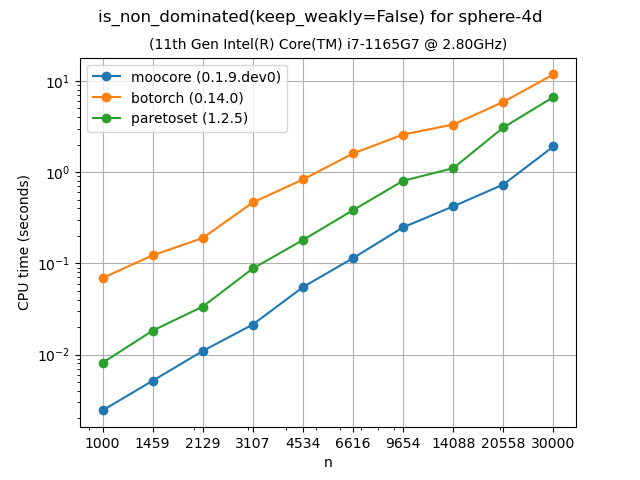
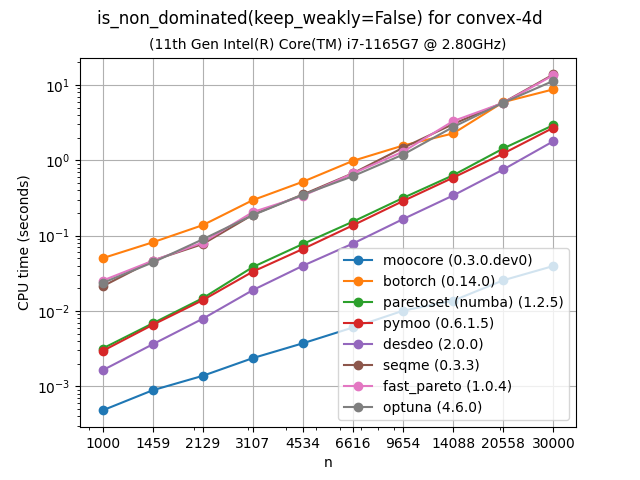
Similar results are obtained with keep_weakly=False, however, this setting
is only supported by moocore, BoTorch and paretoset, thus the other
packages are actually slower to use than reported here, because the user is
forced to remove duplicated points when using them.
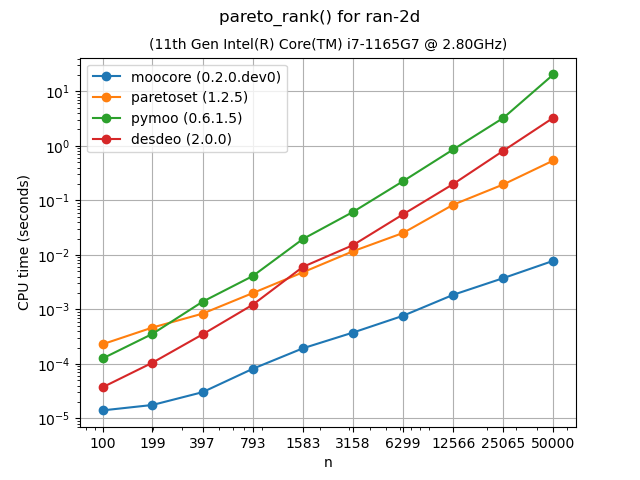
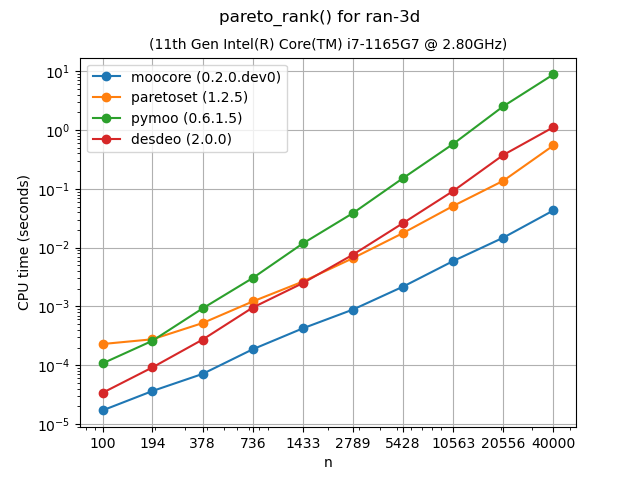
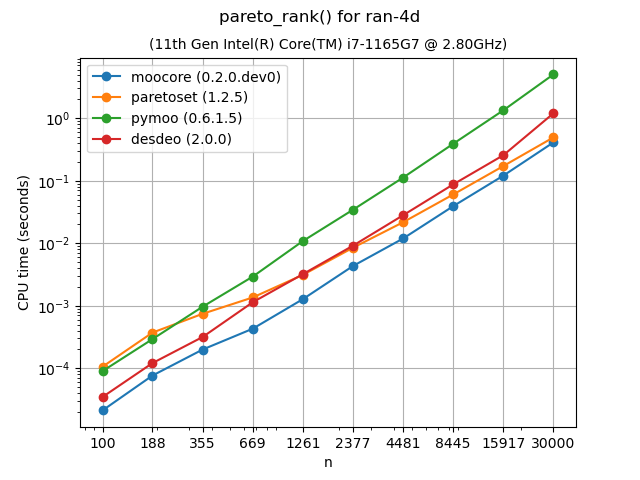
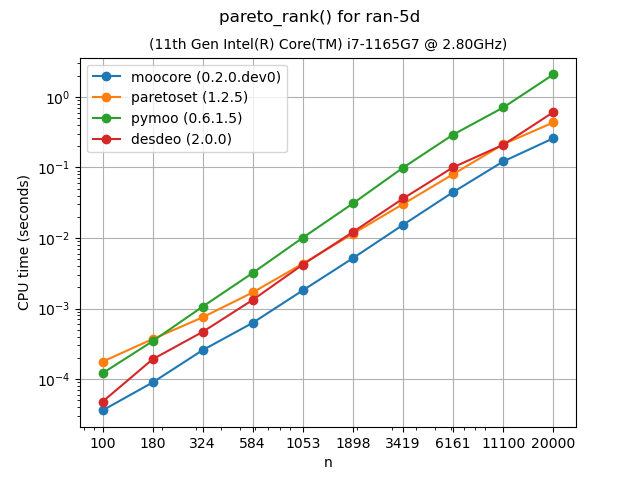
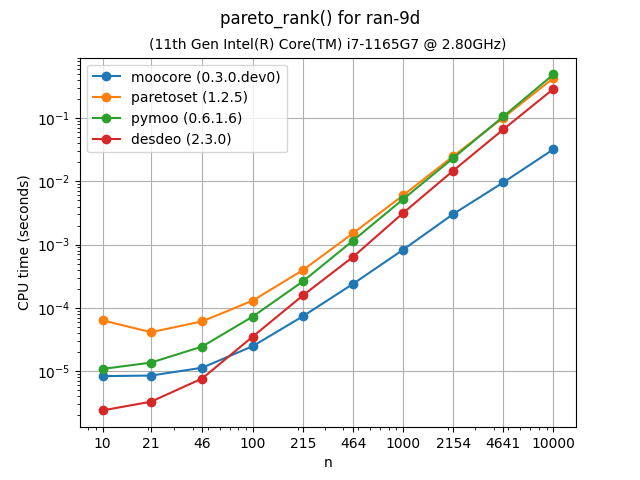
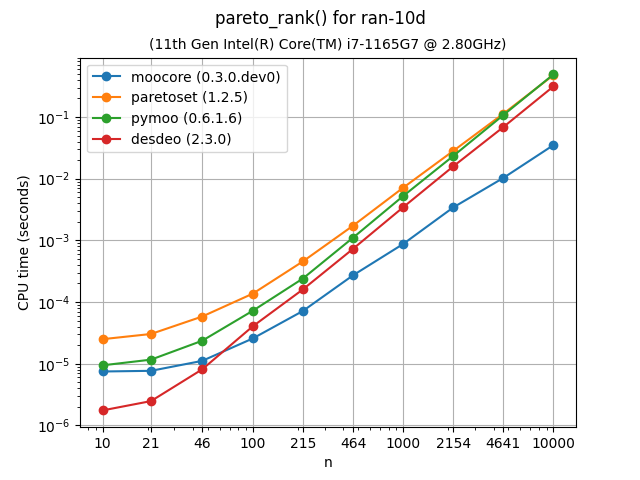
Nondominated Sorting (Pareto ranking)#
Nondominated sorting (or Pareto ranking) assigns a rank to each point according
to Pareto-optimality. It can be used to split a set of points into layers of
nondominated fronts. For more details, see moocore.pareto_rank(). This
function in moocore uses a \(O(n \log n)\) algorithm for 2 dimensions
and a \(O(n^2\log n)\) algorithm for 3 dimensions. As the plots show, this
makes moocore significantly faster than paretoset, pymoo and
DESDEO. With higher dimensions, moocore uses a \(O(n^2\log^{m-2}n)\)
algorithm instead of the \(O(n^3)\) algorithm in paretoset and DESDEO
(latter is compiled with Numba). In these benchmarks points are sampled
uniformly at random within the hyper-cube.
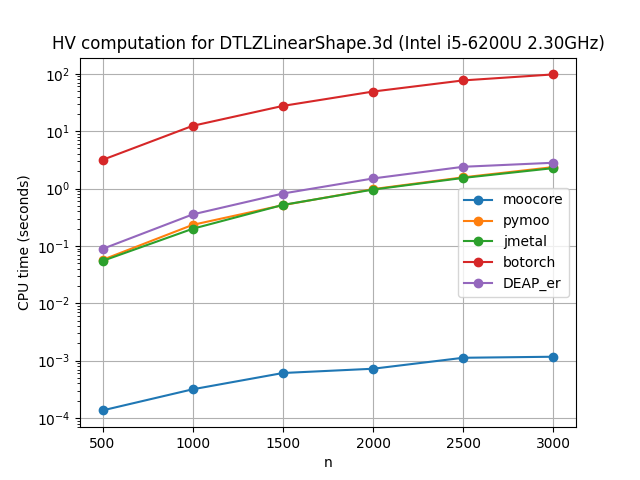
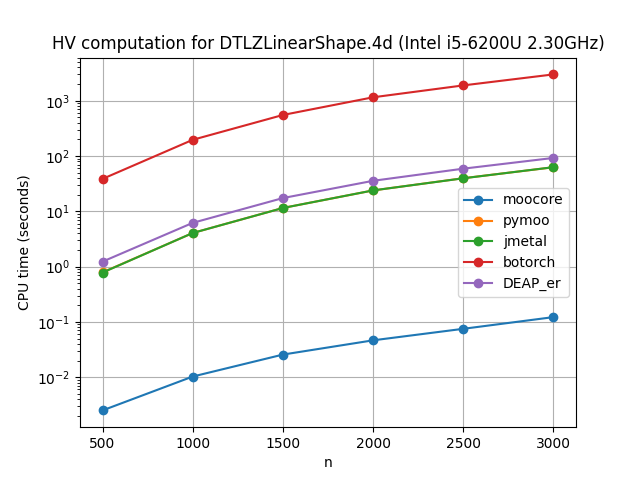
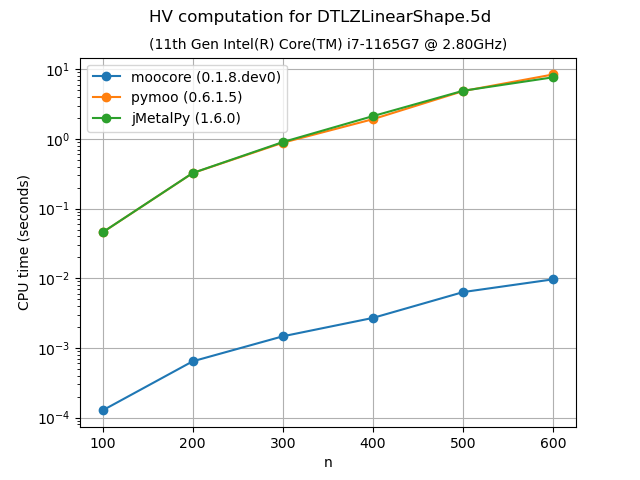
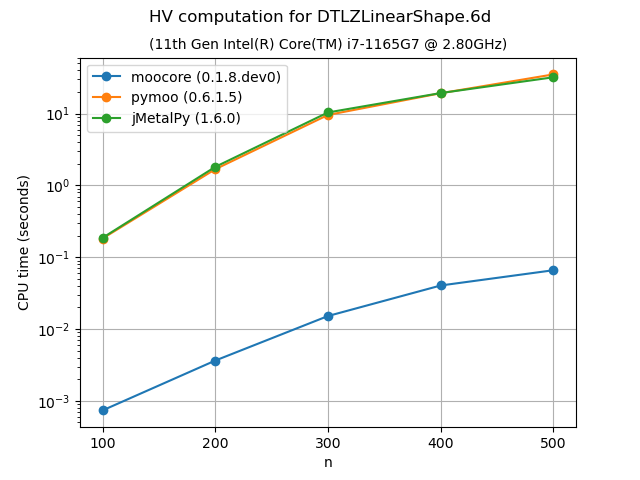
Exact computation of hypervolume#
The following plots compare the speed of computing the hypervolume indicator in 3D, 4D, 5D and 6D. As the plots show, moocore is 100 times faster than the other packages and 1000 times faster than BoTorch and, by extension, Xopt and BoFire.
For 3D, Optuna uses a \(O(n^2)\) algorithm, while moocore uses the best-known \(O(n\log n)\) one, so the gap between the two will get significantly larger with a larger number of points than those tested here. moarchiving uses the same algorithms as moocore for 3D and 4D, but a pure Python implementation, so it is still 10-100 times slower than moocore’s C implementation. BoTorch and fast-pareto are not included for more than 3 objectives because they are tens of thousands of times slower than moocore.
Recent versions of DESDEO, DEAP (≥1.4.4), pymoo (≥0.6.1.6) and jMetalPy (≥1.9.0) already use moocore for hypervolume computation.
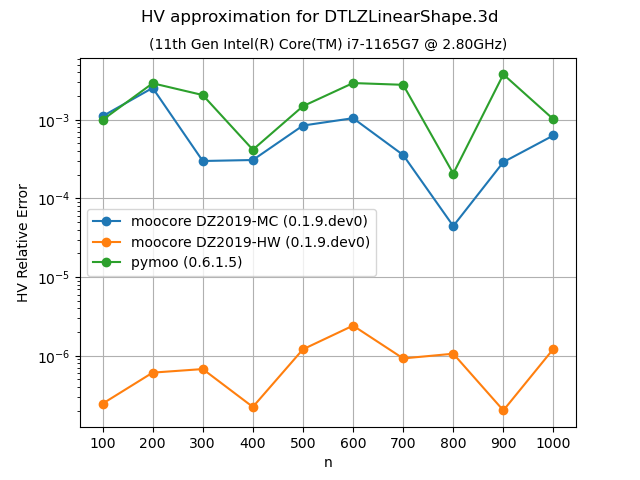
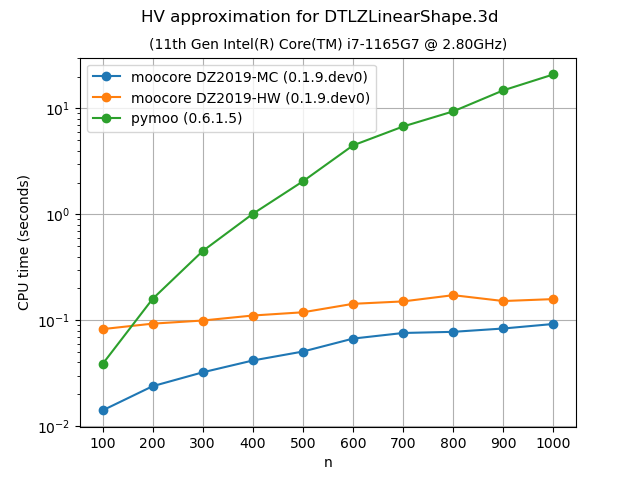
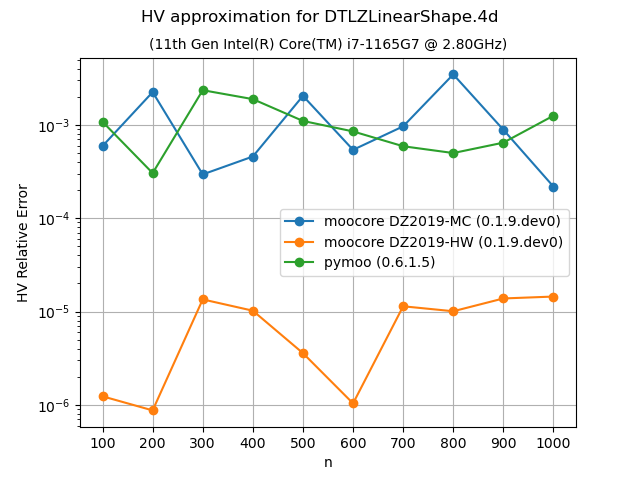
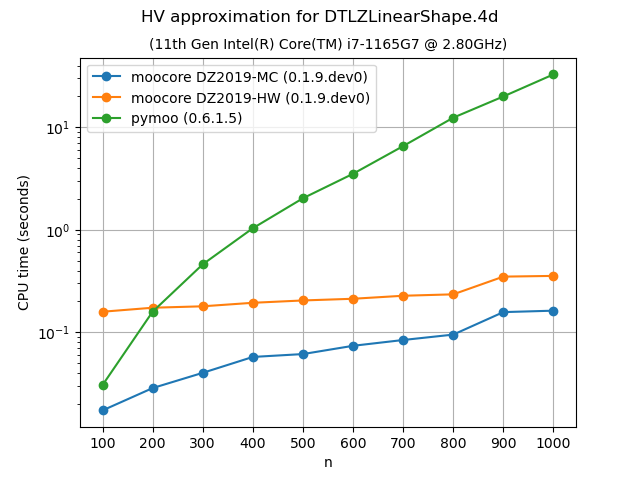
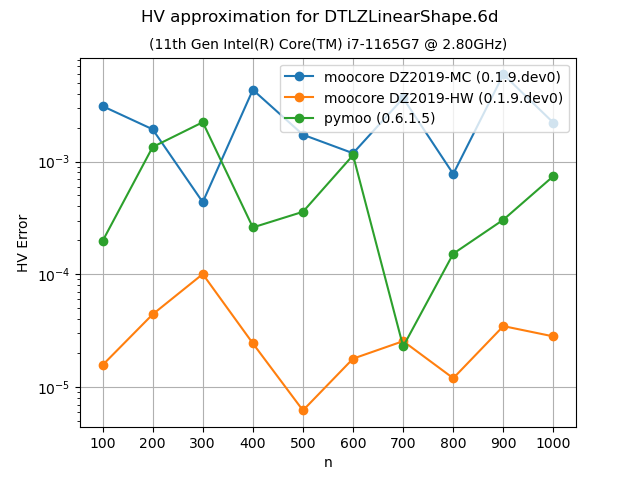
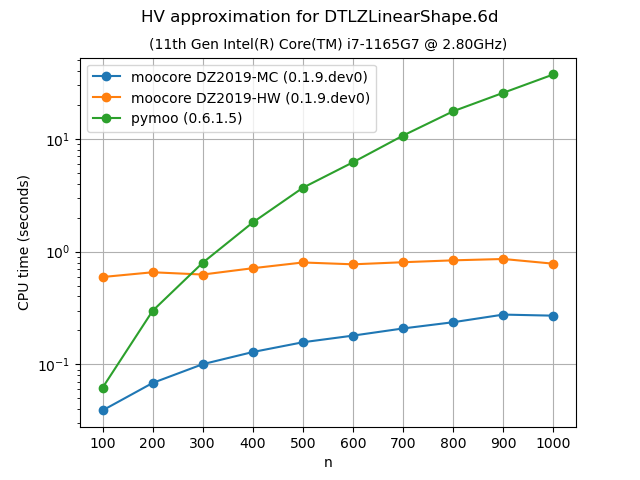
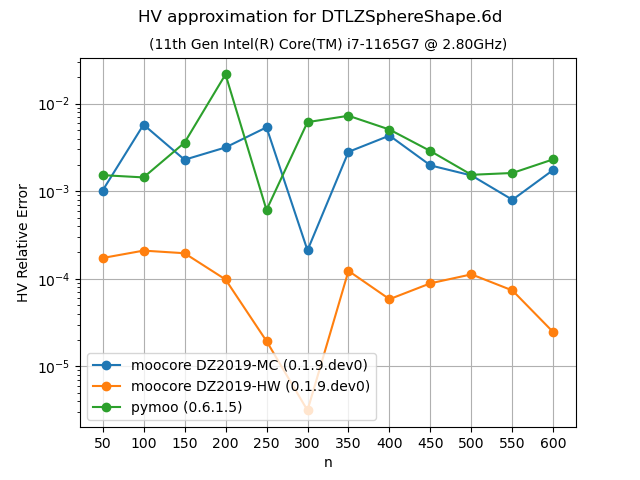
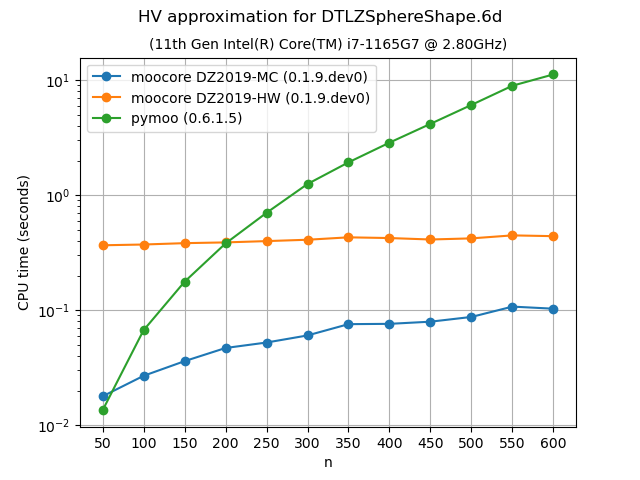
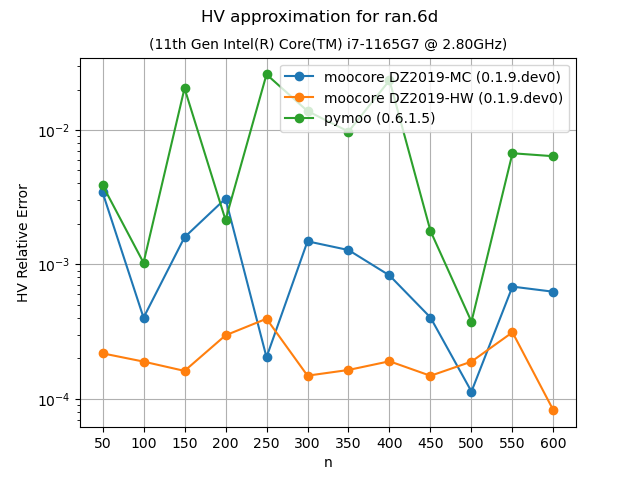
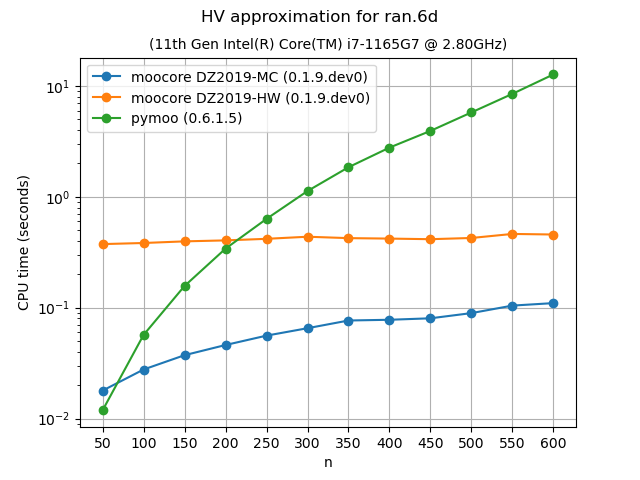
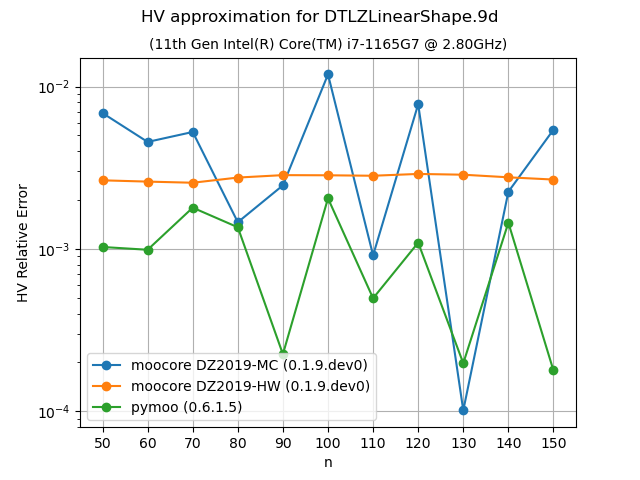
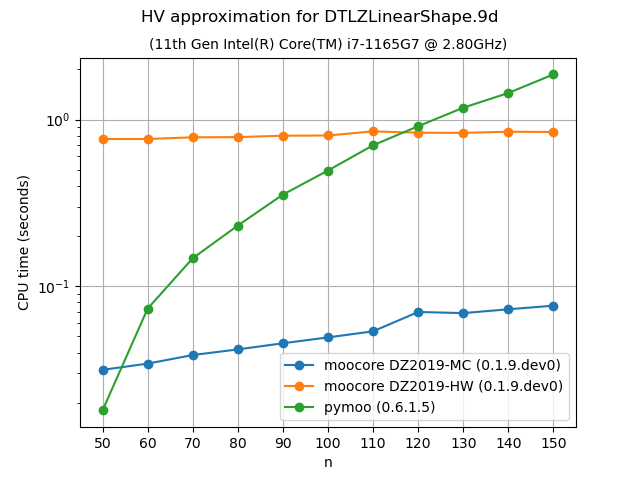
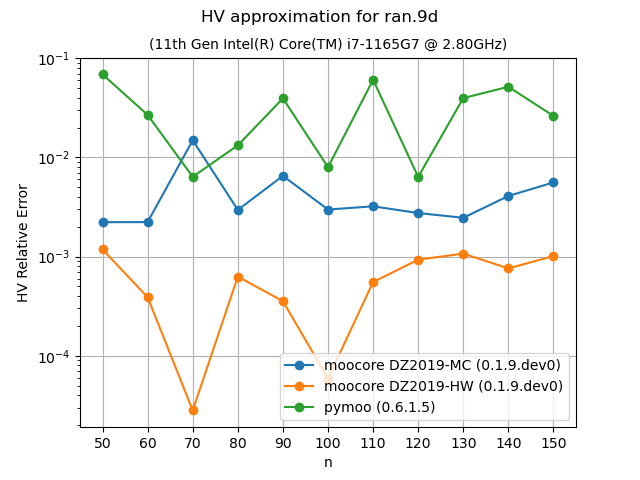
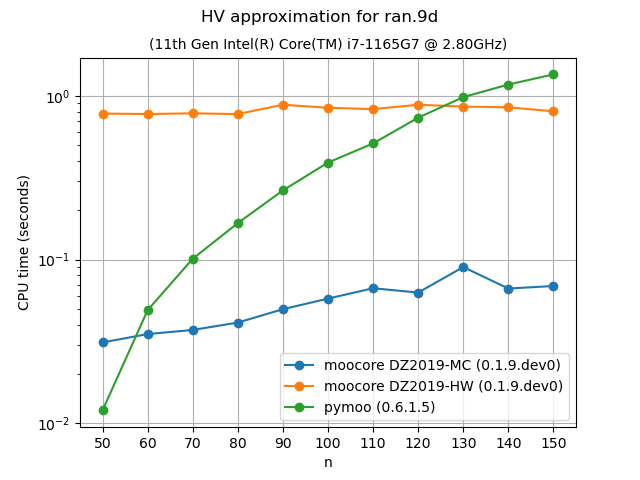
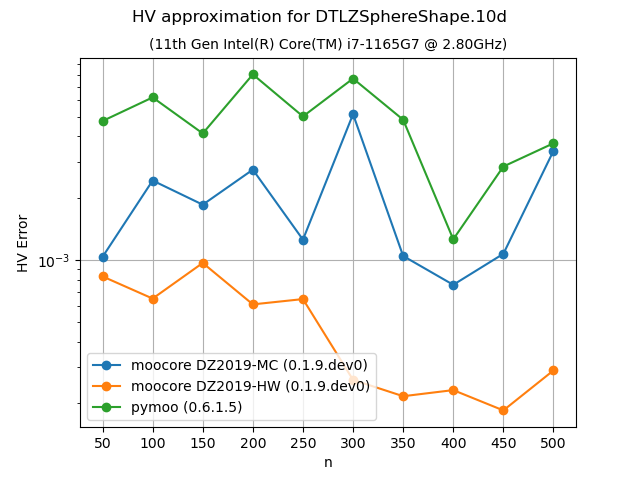
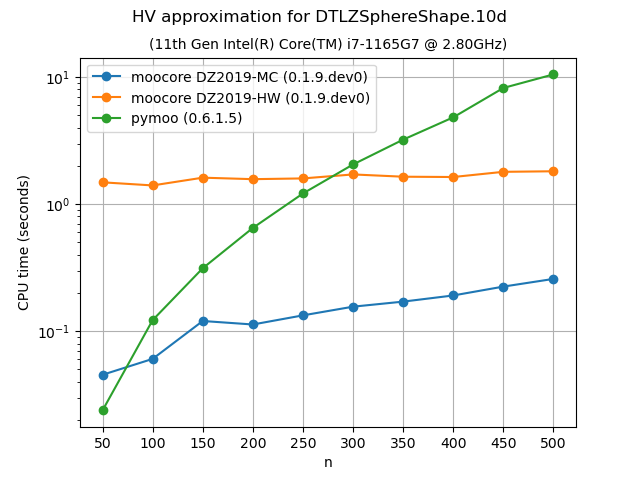
Approximation of the hypervolume#
The following plots compare the accuracy and speed of approximating the
hypervolume with the various methods provided by moocore.hv_approx(). The
plots show that there is no clear winner, in terms of approximation error,
between methods Rphi-FWE+ (default) and DZ2019-HW, but both produce
consistently lower approximation errors than method DZ2019-MC. However, Rphi-FWE+ is as fast as DZ2019-MC and both are consistently faster than DZ2019-HW, in particular with higher number of objectives.
If you compare the plots of DTLZLinearShape-3d and DTLZLinearShape-4d below to the ones above in the previous section, you can see that the exact computation of the hypervolume in 3D or 4D for thousands of points takes milliseconds, whereas approximating the hypervolume is significantly slower and, thus, not worth doing.
Approximating the hypervolume becomes more useful for dimensions higher than 5,
where the exact computation becomes noticeably slower with hundreds of points.
For such problems, method DZ2019-HW becomes significantly slower than
Rphi-FWE+.
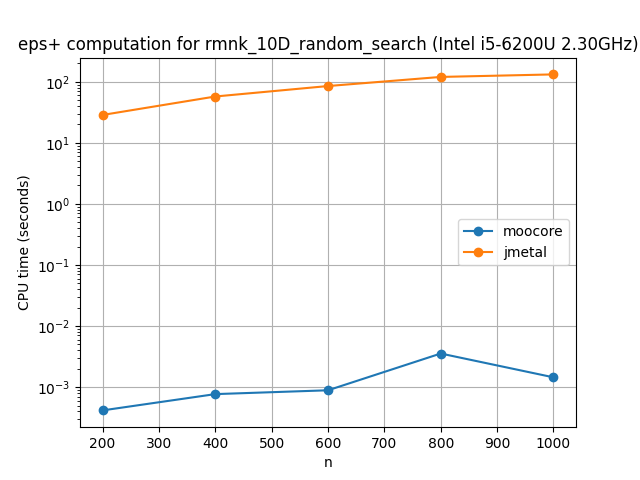
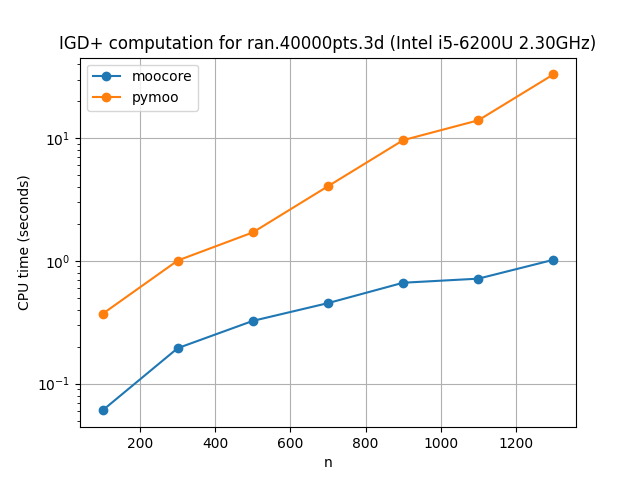
Epsilon and IGD+ indicators#
The following plots compare the speed of computing the epsilon indicator metric and IGD+ indicator. Although the algorithms for computing these metrics are relatively simple and easy to vectorize in Python, the moocore implementation is still 10 to 100 times faster. The implementation of IGD+ in DESDEO and jMetalPy is almost a thousand times slower than moocore, so it is not included in the benchmarks below.